之前一直在研究怎么把三台机体的腿部组合在一起 组了大半个月从一号机研究到二号 参考了LAS大佬的转轴运用(不得不说这种操作太吃配件)再由二号机到三号机 腿部过程放在最后 三号机腿部的运用只需要两条腿 后续想到把腿部直接放到背包 就当腿部喷口了(安慰自己
武器方面最开始折叠战斧没怎么升级 用废料组了个钢钉凑合用(就当他是把 主要配件方面应该是三台机体没有超出的 需要一台红杉+影镭+石英 红杉的主要提供了更多的3mm接口 一条腿需要4个x2 右肩防弹装甲1 背包接口2 折叠斧1 全机用了12个 属于刚刚好够用的水准(太巧了 还以为还要倒贴)
腿部下侧能进行部分z轴翻转 y轴翻转 特别是y轴翻转不仅能实现类似溜冰的腿部扭动 对于难拧的脚部球关 能直接对小腿左右侧摆调整接地性 更适合把玩(这种中部大大的感觉还挺大丰的 之前的改造的目的大部分是因为想把三个组在一起 能切换前倾高速 后向逆足的想法)
腿部本身是由两个腿组成 简单的翻转就能实现2.0的战车模式(没啥用) 不过机体此时因为背包过重得向前倾(倒不如说为了照顾这个背包一直是向前倾一些的)而把腿部完全展开 就能实现完全靠不住的巨人姿势(没啥用 但不能没有)
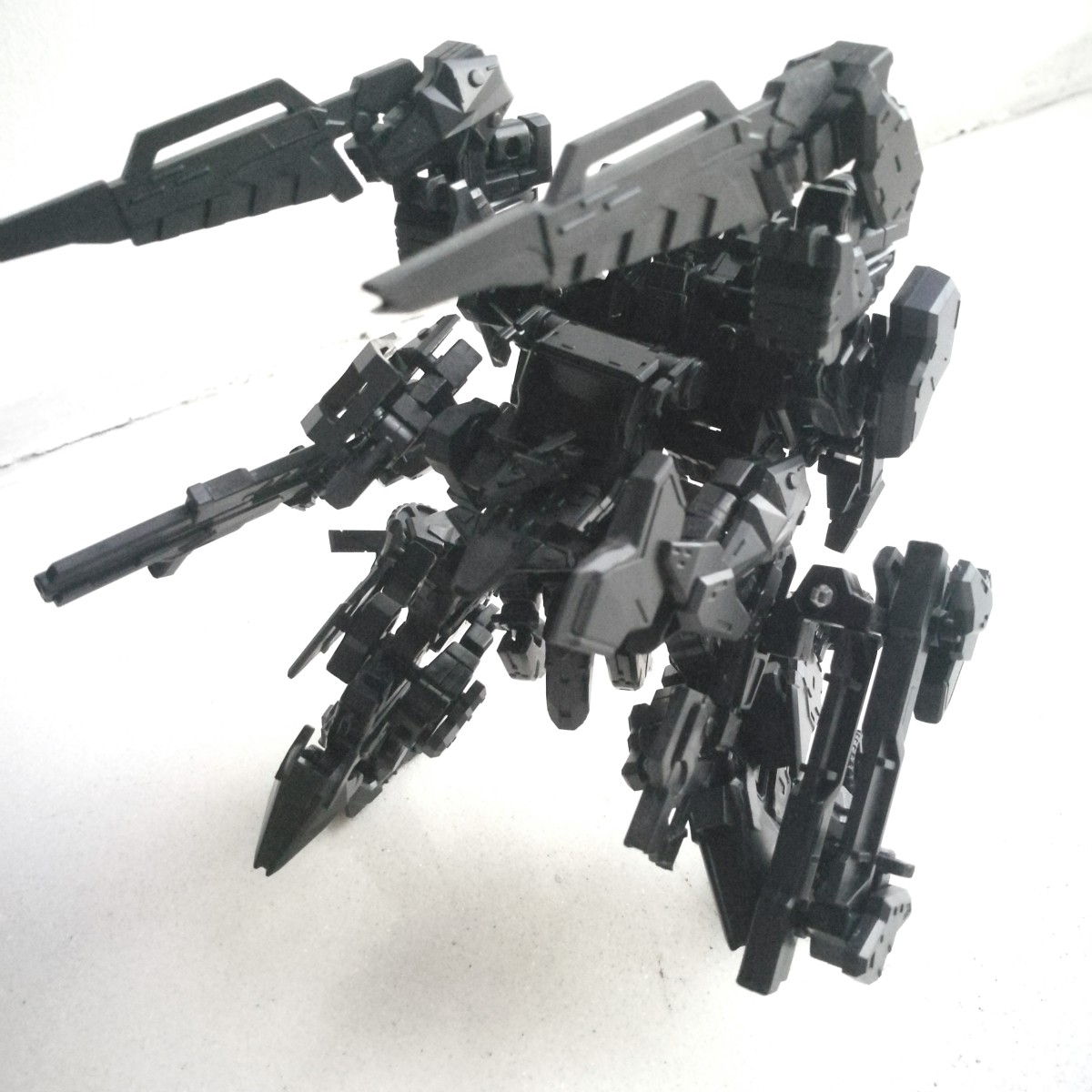
腿部两个向内的钩爪 用于对下方区域进行固定配合高速移动 上方背包两个向前向上的两个钩爪 后面背包内侧也附有两个钩爪 作为宇宙机也足够用(因为这个大背包 真要带上姿势喷口估计用的也挺多 腿部外侧做成加速器 前方两个喷口 胯下的三个喷口)
视频拆卸演示 BV 1m8411k7oz 如果是买了新的灰色想要复刻的话 可以考虑再出一期详细的图解,虽然我感觉拼过的应该都看得懂了


















请先登录后评论
- (✪ω✪)
- (✺ω✺)
- (∩ᵒ̴̶̷̤⌔ᵒ̴̶̷̤∩)
- (⁎⁍̴̛ᴗ⁍̴̛⁎)
- (ˊᵒ̴̶̷̤ꇴᵒ̴̶̷̤ˋ)꒰
- (˶‾᷄⁻̫‾᷅˵)
- (。◝‿◜。)
- ヾ(*ΦωΦ)ツ
- (๑•̀ω•́๑)
- ψ(`∇´)ψ
- (,,•́.•̀,,)
- ( ̄3 ̄)a
- (* ̄∇ ̄*)
- ٩(•̤̀ᵕ•̤́๑)ᵒᵏᵎᵎᵎᵎ
- (๑Ő௰Ő๑)
- (ÒωÓױ)
- (●´∀`●)ノ
- \(^o^)/
- Y(^o^)Y
- (^-^)V
- (*^__^*)
- O(∩_∩)O
- ヘ|・∀・|ノ*~●
- ☆´∀`☆
- (*≧∪≦)
- (゚▽゚)/
- ヾ(^▽^ヾ)
- ヽ(^o^)丿
- ヽ(゚∀゚)メ(゚∀゚)ノ
- (๑•̀ㅂ•́)و✧
- ヘ(゚∀゚ヘ)アヒャ
- (^.^)YYa!!
- m9(`Д´)
- (`Д´*)9
- ヽ(`⌒´)ノ
- (*´ノ皿`)
- (`皿´)
- ヽ(`Д´)ノ
- ヽ(`З’)ノ
- d(・`ω´・d*)
- (`へ´)
- (〃´皿`)q
- щ(`ω´щ)
- (╬ ̄皿 ̄)=○
- (σ`д′)σ
- (/"≡ _ ≡)/~┴┴
- (╯‵□′)╯︵┻━┻
- ┻━┻︵╰(‵□′╰)
- o(TωT)o
- (*T_T*)
- (/□\*)
- (╥╯^╰╥)
- /(ㄒoㄒ)/~~
- T^T
- ╥﹏╥...
- ┭┮﹏┭┮
- ε(┬┬﹏┬┬)3
- ヘ(;´Д`ヘ)
- ╭(╯^╰)╮
- (〒︿〒)
- (o´゚□゚`o)
- ヽ(。>д<)p
- (つД`)・゚・
- (ಥ_ಥ)
- (*゚Д゚*)
- ノ)゚Д゚(
- щ(゚Д゚щ)
- 乂(゚Д゚三゚Д゚)乂
- Σ(o゚д゚oノ)
- !?(・_・;?
- 《(;´Д`)》
- Σ(゚д゚lll)
- (;゚∀゚)=3ハァハァ
- (⊙ˍ⊙)
- ⊙﹏⊙|||
- Σ( ° △ °|||)︴
- ┏(゜ロ゜;)┛
- (°□°;)
- ∑(っ °Д °;)っ
- :-O



















